
问题描述:
开发的大屏有一处实时感知数据区域,用于显示采集到的机器人的实时里程计相关传感器数据,以及机器人摄像头的实时图片帧。在没有对接这个接口时,该页大屏其他图表显示正常;在正常测试对接该接口时,各区域也都能实时显示数据。
因为机器人也无法实时一直开着,所以后续后端对接处理的服务就关闭了,也就没在关注。后面偶然一次关注该页大屏时,发现其他也图表都没有显示,且该页页面卡顿。
问题原因:
因为图片帧对接的后端接口无法建立连接(后面核实是机器人只在测试调试时才开启了后端该接口服务,其他时候该接口服务功能(如端口)是关闭的),导致前端大屏无法发送请求,连接被拒绝,然而,js如下代码片段:
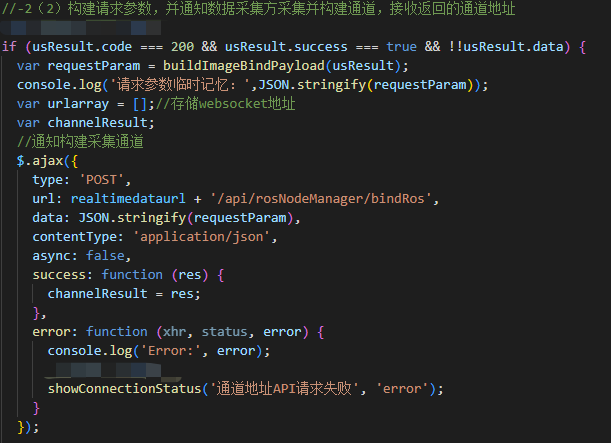
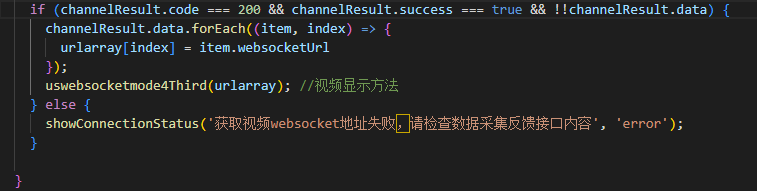
1 if (usResult.code === 200 && usResult.success === true && !!usResult.data) { 2 var requestParam = buildImageBindPayload(usResult); 3 var urlarray = [];//存储websocket地址 4 var channelResult; 5 //通知构建采集通道 6 $.ajax({ 7 type: 'POST', 8 url: realtimedataurl + '/api/rosNodeManager/bindRos', 9 data: JSON.stringify(requestParam), 10 contentType: 'application/json', 11 async: false, 12 success: function (res) { 13 channelResult = res; 14 }, 15 error: function (xhr, status, error) { 16 console.log('Error:', error); 17 showConnectionStatus('通道地址API请求失败', 'error'); 18 } 19 }); 20 if (channelResult.code === 200 && channelResult.success === true && !!channelResult.data) { 21 channelResult.data.forEach((item, index) => { 22 urlarray[index] = item.websocketUrl 23 }); 24 uswebsocketmode4Third(urlarray); //视频显示方法 25 } else { 26 showConnectionStatus('获取视频websocket地址失败,请检查数据采集反馈接口内容', 'error'); 27 } 28 29 }
因为后端服务连接无法访问,所以请求直接进入error分支,并且channelResult也是null并没有任何后端接口返回的值,然后再执行图中:
if (channelResult.code === 200 && channelResult.success === true && !!channelResult.data)时就异常报错了,因为js无法获取channelResult.code信息(channelResult非正常情况赋值,里面没有code结构),才导致页面捕获到该异常卡在该区域图表函数,而该页其他图表的函数调用顺序是在当前图片帧图表的下方(之后),导致其他图表函数就没有被调用。
解决办法:
方法1:
追加一个isError变量,初始值置为false;代表没有异常,一旦请求接口进入error分支(比如连接被拒绝,未开启接口服务等),就将isError置为true;
然后在请求接口代码段下方做判断,isError为true,直接结束。
修订后代码如下:
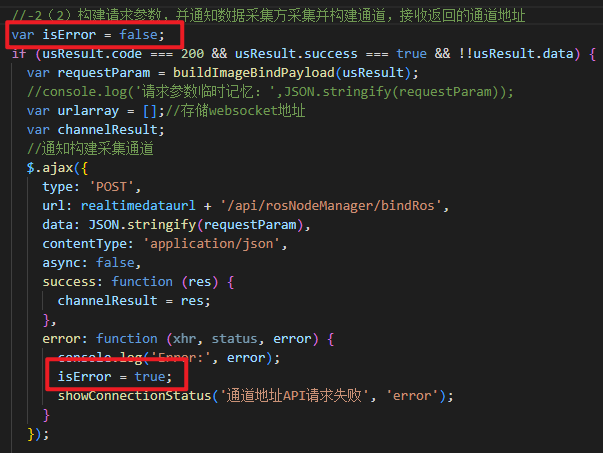
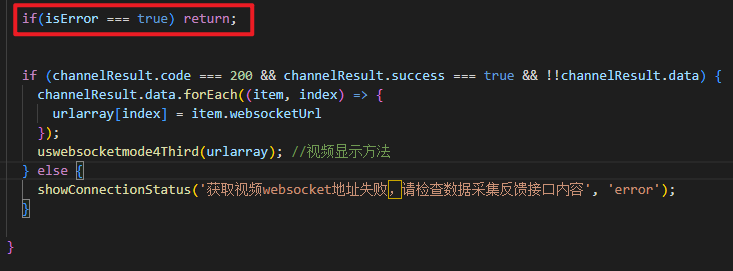
1 //-2(2)构建请求参数,并通知数据采集方采集并构建通道,接收返回的通道地址 2 var isError = false; 3 if (usResult.code === 200 && usResult.success === true && !!usResult.data) { 4 var requestParam = buildImageBindPayload(usResult); 5 //console.log('请求参数临时记忆:',JSON.stringify(requestParam)); 6 var urlarray = [];//存储websocket地址 7 var channelResult; 8 //通知构建采集通道 9 $.ajax({ 10 type: 'POST', 11 url: realtimedataurl + '/api/rosNodeManager/bindRos', 12 data: JSON.stringify(requestParam), 13 contentType: 'application/json', 14 async: false, 15 success: function (res) { 16 channelResult = res; 17 }, 18 error: function (xhr, status, error) { 19 console.log('Error:', error); 20 isError = true; 21 showConnectionStatus('通道地址API请求失败', 'error'); 22 } 23 }); 24 25 if(isError === true) return; 26 27 if (channelResult.code === 200 && channelResult.success === true && !!channelResult.data) { 28 channelResult.data.forEach((item, index) => { 29 urlarray[index] = item.websocketUrl 30 }); 31 uswebsocketmode4Third(urlarray); //视频显示方法 32 } else { 33 showConnectionStatus('获取视频websocket地址失败,请检查数据采集反馈接口内容', 'error'); 34 } 35 36 }
方法2:
最简单,不关心函数内部的异常,直接在调用最顶级函数的地方,包一下try-catch即可。
如:
try { USDisplay4Third(); } catch (e) { }
1 // 在全局作用域定义定时器变量 2 let paramsDisplayTimer = null; 3 export function ThirdTab() { 4 // 5 $(function () { 6 7 // 清除已存在的定时器 8 if (paramsDisplayTimer !== null) { 9 clearInterval(paramsDisplayTimer); 10 paramsDisplayTimer = null; 11 } 12 // 立即执行一次,保证第一次能立即执行 13 paramsDisplay(); 14 //try { paramsDisplay(); } catch (e) { } 15 16 // 设置新的定时器 17 paramsDisplayTimer = setInterval(function () { 18 paramsDisplay(); 19 //try { paramsDisplay(); } catch (e) { } 20 }, 1000); 21 22 23 try { USDisplay4Third(); } catch (e) { } 24 25 26 //第三页无人系统介绍 27 //unmanned_system_introduce(); 28 try { unmanned_system_introduce(); } catch (e) { } 29 30 //第三页地图 31 //unmanned_system_map_openlayers(); 32 try { unmanned_system_map_openlayers(); } catch (e) { } 33 34 }) 35 36 }