
半挂汽车列车横向稳定性控制:基于TruckSim与Simulink联合仿真 - 详解
半挂汽车列车4自由度6轴整车model,横向稳定性控制,在低附着系数路面,进行典型3个工况,角阶跃,双移线,方向盘转角。 采用算法:模糊PID,制动力矩分配,最优滑移率滑膜控制。 以上基于trucksim和simulink联合仿真,有对应 p-a-p-e-r参考
在汽车工程领域,半挂汽车列车的横向稳定性一直是研究热点。特别是在低附着系数路面,保障车辆行驶安全与稳定更是重中之重。今天咱就来聊聊基于4自由度6轴整车model的半挂汽车列车横向稳定性控制,以及在TruckSim和Simulink联合仿真环境下的实现。
工况设定:典型驾驶场景模拟
咱选了三个典型工况:角阶跃、双移线和方向盘转角。这三种工况基本覆盖了车辆在实际行驶中遇到的突发转向情况。比如说角阶跃工况,模拟的就是驾驶员突然转动方向盘,车辆迅速响应的过程。
算法应用:多管齐下保障稳定
模糊PID控制
模糊PID控制是个好东西,它能根据实际情况动态调整控制参数。传统的PID控制依赖精确的数学模型,但车辆行驶环境复杂多变,模糊PID就派上用场了。在Simulink里搭建模糊PID控制器,代码大概像这样:
% 定义模糊推理系统
fis = newfis('fuzzy_pid');
% 添加输入变量
fis = addvar(fis,'input','e',[-3 3]);
fis = addmf(fis,'input',1,'NB','zmf',[-3 -1]);
fis = addmf(fis,'input',1,'NS','trimf',[-3 0 3]);
% 类似地添加其他隶属度函数
% 添加输出变量
fis = addvar(fis,'output','kp',[0 10]);
% 添加kp的隶属度函数
% 定义模糊规则
rulelist = [1 1 1 1 1;2 2 2 1 1;% 更多规则...];
fis = addrule(fis,rulelist);
% 保存模糊推理系统
writefis(fis,'fuzzy_pid.fis');这里,先创建了一个模糊推理系统,定义了输入变量(比如误差e)和输出变量(像kp),然后添加隶属度函数描述变量的模糊状态,最后通过规则列表确定如何根据输入得到输出。模糊PID能实时根据车辆状态调整控制参数,让控制更灵活。
制动力矩分配
制动力矩分配算法能合理分配各个车轮的制动力,以提高车辆稳定性。不同的工况和路面条件下,每个车轮所需的制动力不同。代码思路大概是这样:
function [brake_torque] = distribute_brake_torque(vehicle_state, road_condition)% 根据车辆状态(速度、转向角等)和路面条件计算制动力矩分配if road_condition == 'low_friction'% 低附着系数路面的分配策略front_brake = vehicle_state.speed * 0.2;rear_brake = vehicle_state.speed * 0.3;% 更多车轮的分配计算...else% 其他路面的分配策略endbrake_torque = [front_brake, rear_brake,...];
end这个函数根据车辆当前状态和路面状况,为各个车轮分配制动力矩,确保车辆在不同情况下都能有效制动且保持稳定。
最优滑移率滑膜控制
最优滑移率滑膜控制能让车轮尽可能工作在最优滑移率附近,提高轮胎与地面的附着力。简单理解,滑膜控制就像给车轮状态设定一个“滑动轨迹”,让它沿着这个轨迹达到最优滑移率。
% 滑膜控制相关代码
s = calculate_sliding_surface(vehicle_state);
% 根据滑膜面s计算控制输入
if s > 0control_input = max_control;
elsecontrol_input = min_control;
end这里通过计算滑膜面s,根据s的值来确定控制输入,从而调整车轮的滑移率。
联合仿真:TruckSim与Simulink的强强联手
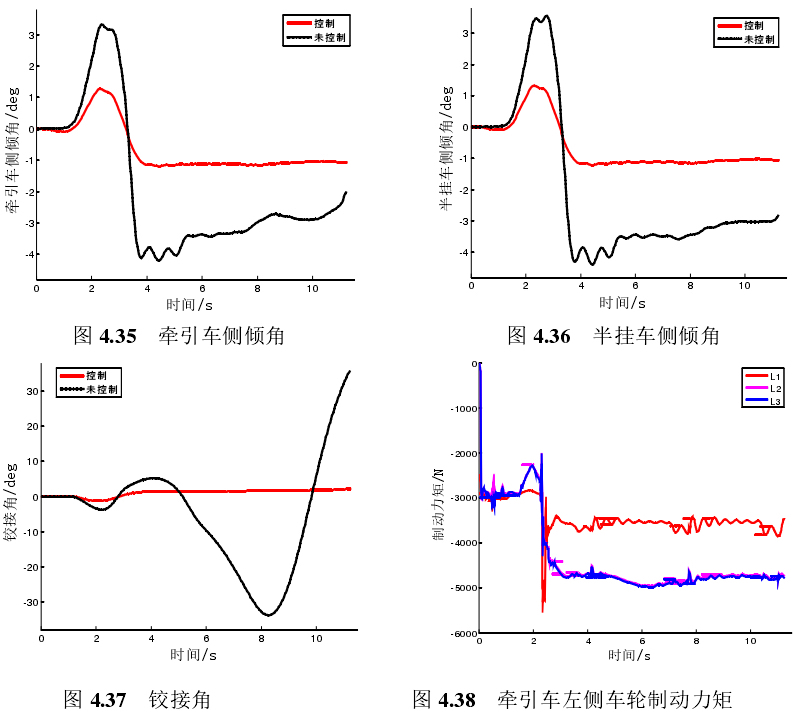
基于TruckSim和Simulink联合仿真,能充分利用两者优势。TruckSim提供高精度的车辆动力学模型,Simulink用于搭建控制算法。通过接口连接两者,就能进行完整的车辆控制仿真。
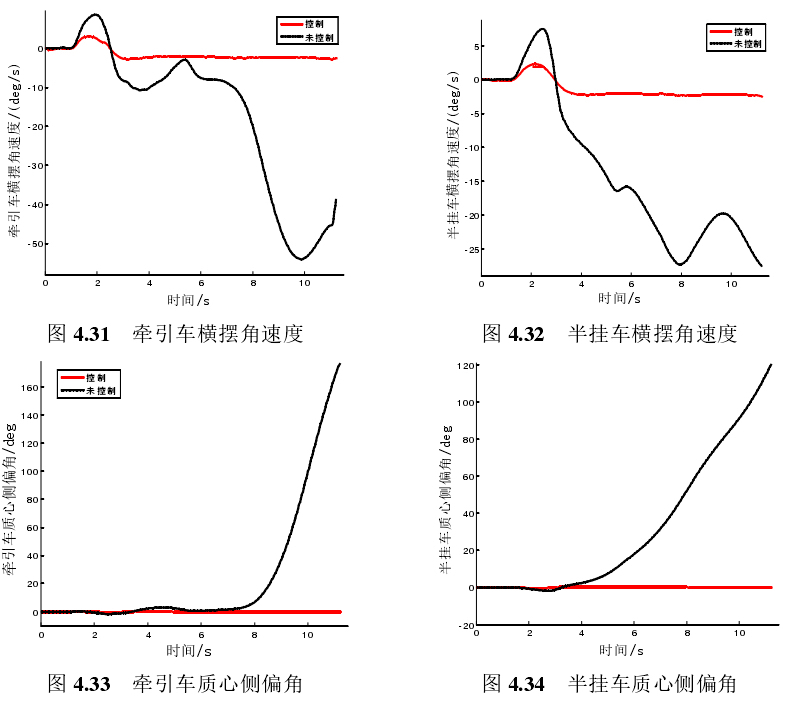
咱有相关paper参考,能深入研究每个细节。这种联合仿真的方式,让我们在研究半挂汽车列车横向稳定性控制上,能更直观、准确地看到不同算法在不同工况下的效果,为实际车辆控制系统开发提供有力支持。
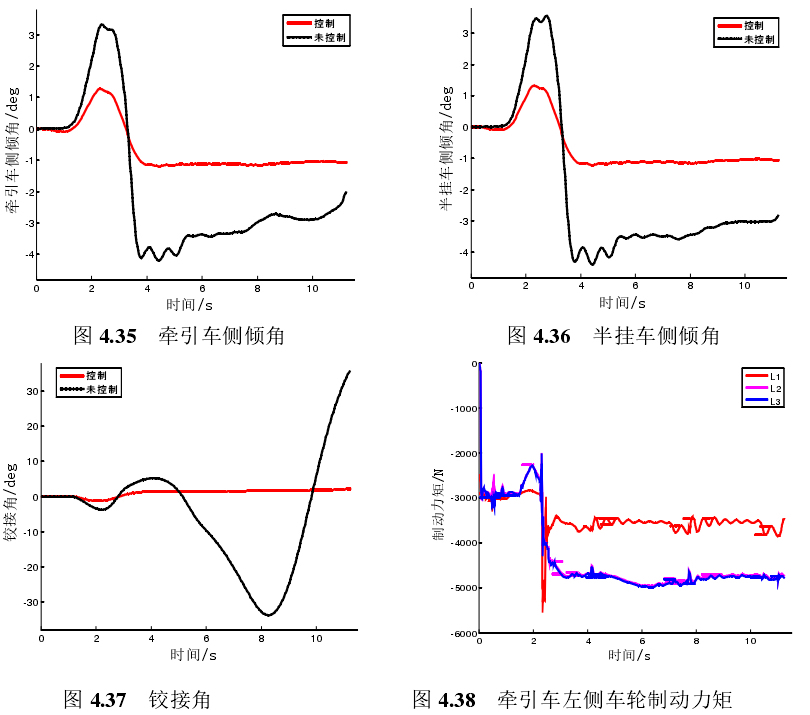
总的来说,通过这几种算法和联合仿真,能更好地保障半挂汽车列车在低附着系数路面的横向稳定性,为交通安全添砖加瓦。