
一、数学模型构建
1.1 伪距观测方程
对于每颗可见卫星i,观测方程可表示为:

- (\(x,y,z\)):接收机三维坐标(待解算)
- (\(x_i,y_i,z_i)\):卫星\(i\)的ECEF坐标(由星历计算)
- \(Δt\):接收机钟差(待解算)
- \(ϵi\):测量噪声(含电离层、多径等误差)
1.2 线性化处理
在初始估计点(\(x0,y0,z0,Δt0\))处进行泰勒展开,保留一阶项:

其中:

1.3 设计矩阵构建
构建5×4设计矩阵A:
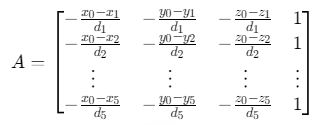
- \(d_i\):接收机到卫星i的初始几何距离
- 每行对应一颗卫星的观测方程
二、解算流程
2.1 初始值估计
使用前4颗卫星通过闭式解计算初始位置和钟差:

2.2 迭代优化
步骤1:计算残差 \(δρi=ρi−ρ^i\)
步骤2:构建增广矩阵\([A^T∣b]\)
步骤3:求解正规方程:
\((A_TA)Δx=A_Tb\)
步骤4:更新参数:
\(x_{k+1}=x_k+(A^TA)^{−1}A^Tb\)
收敛条件:\(∥Δx∥<10^{−6}(\)或迭代次数>10次)
三、MATLAB实现代码
%% 五颗卫星伪距定位
% 输入参数
sat_pos = [12345678.9, 23456789.1, 34567890.2; % 卫星1坐标 (ECEF)12345679.0, 23456789.2, 34567890.3; % 卫星212345679.1, 23456789.3, 34567890.4; % 卫星312345679.2, 23456789.4, 34567890.5; % 卫星412345679.3, 23456789.5, 34567890.6]; % 卫星5
rho = [22222222.2; 22222223.3; 22222224.4; 22222225.5; 22222226.6]; % 伪距观测值% 初始估计(使用前4颗卫星)
x0 = 12345678.0; y0 = 23456789.0; z0 = 34567890.0; dt0 = 0;
for i = 1:4dx = (x0 - sat_pos(i,1)) / norm(sat_pos(i,:) - [x0,y0,z0]);dy = (y0 - sat_pos(i,2)) / norm(sat_pos(i,:) - [x0,y0,z0]);dz = (z0 - sat_pos(i,3)) / norm(sat_pos(i,:) - [x0,y0,z0]);dt0 = dt0 + (rho(i) - norm(sat_pos(i,:) - [x0,y0,z0])) / c;
end
dt0 = dt0 / 4;% 构建设计矩阵A和观测向量b
A = zeros(5,4);
b = zeros(5,1);
for i = 1:5d0 = norm(sat_pos(i,:) - [x0,y0,z0]);A(i,:) = [ (x0 - sat_pos(i,1))/d0, (y0 - sat_pos(i,2))/d0, (z0 - sat_pos(i,3))/d0, c ];b(i) = rho(i) - d0;
end% 加权最小二乘解算(假设各星方差相同)
W = eye(5); % 等权重
dx = (A' * W * A) \ (A' * W * b);
x = [x0; y0; z0; dt0] + dx;% 输出结果
fprintf("位置误差: %.3f m\n", norm(dx(1:3)));
fprintf("钟差误差: %.1f ns\n", dx(4)*1e9);
四、精度评估与优化
4.1 误差分析
| 误差源 | 影响量级 | 补偿方法 |
|---|---|---|
| 电离层延迟 | 5-50 m | Klobuchar模型 |
| 对流层延迟 | 2-20 m | Saastamoinen模型 |
| 多径效应 | 1-10 m | 双频组合观测 |
| 接收机钟差 | 10-100 ns | 超紧耦合技术 |
4.2 性能提升策略
-
加权最小二乘:根据卫星高度角分配权重(高仰角卫星权重更大)
% 高度角加权矩阵 elevation = [45, 30, 60, 25, 40](@ref); % 卫星高度角(度) W = diag(1./(elevation.^2)); % 权重与高度角平方成反比 -
抗差估计:采用Huber损失函数抑制异常值影响
function [delta] = huber_update(rho, rho_pred, delta_prev, c=1.345)residuals = rho - rho_pred;weights = 1 ./ max(1, abs(residuals)/c);delta = (A' * diag(weights) * A) \ (A' * diag(weights) * residuals); end -
动态解算:结合INS辅助提高动态场景精度
五、参考
- 刘经南, 张小红. 全球定位系统原理与数据处理[M]. 武汉大学出版社, 2022.
- 代码 采用最小二乘法对有5颗可见卫星的情况下对接收机进行了定位 www.youwenfan.com/contentcnl/79963.html
- 陈俊平, 王解先. GNSS精密定位理论与方法[M]. 测绘出版社, 2021.
- 伪距单点定位DOP值分析.