类比理解:
- DINOv3 就像一位博物学家。他看到一张街景照片会说:“这是一个城市街道,有柏油路、红砖建筑和落叶乔木。” 他看到另一张不同地点的照片,如果语义相似,他也会给出类似的描述。
- CosPlace 就像一位侦探。他的任务是:“忽略掉现在是冬天还是夏天,忽略掉那辆停着的车的颜色,告诉我这是不是‘主街和第一大道交汇处的东南角’。” 他专注于那些稳定、独特的细节来精确定位。
2. 对导航任务不同阶段的优化
基于上述根本差异,它们在导航流程中的不同阶段表现出不同的优势:
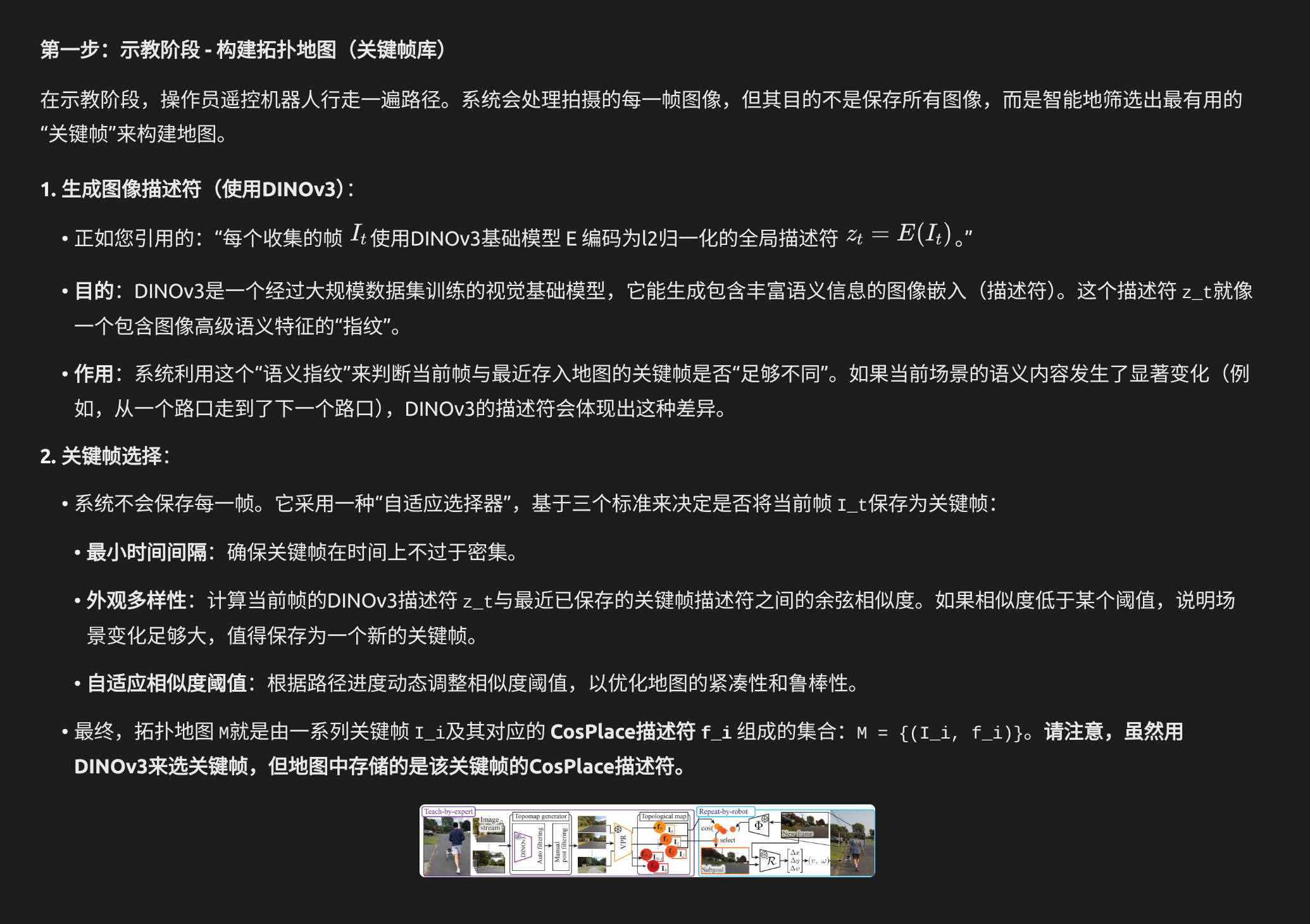
- 建图阶段(关键帧选择)需要“去冗余”:
- 目标:在示教过程中,机器人会采集大量连续帧。如果全部保存,地图会非常臃肿,且连续帧之间信息冗余度高。
- DINOv3的优势:利用其强大的语义理解能力,可以判断当前帧与上一个关键帧的场景语义是否发生了显著变化。例如,从“人行道”进入“十字路口”,语义变化大,DINOv3的相似度会变低,系统就会将此帧选为新的关键帧。但如果只是在同一条人行道上走了10米,场景语义基本不变,DINOv3的相似度会很高,系统就不会保存这冗余的10米内的帧。
- 结果:用DINOv3选帧,可以得到一个紧凑、语义化的拓扑地图,每个关键帧都代表一个独特的场景节点。
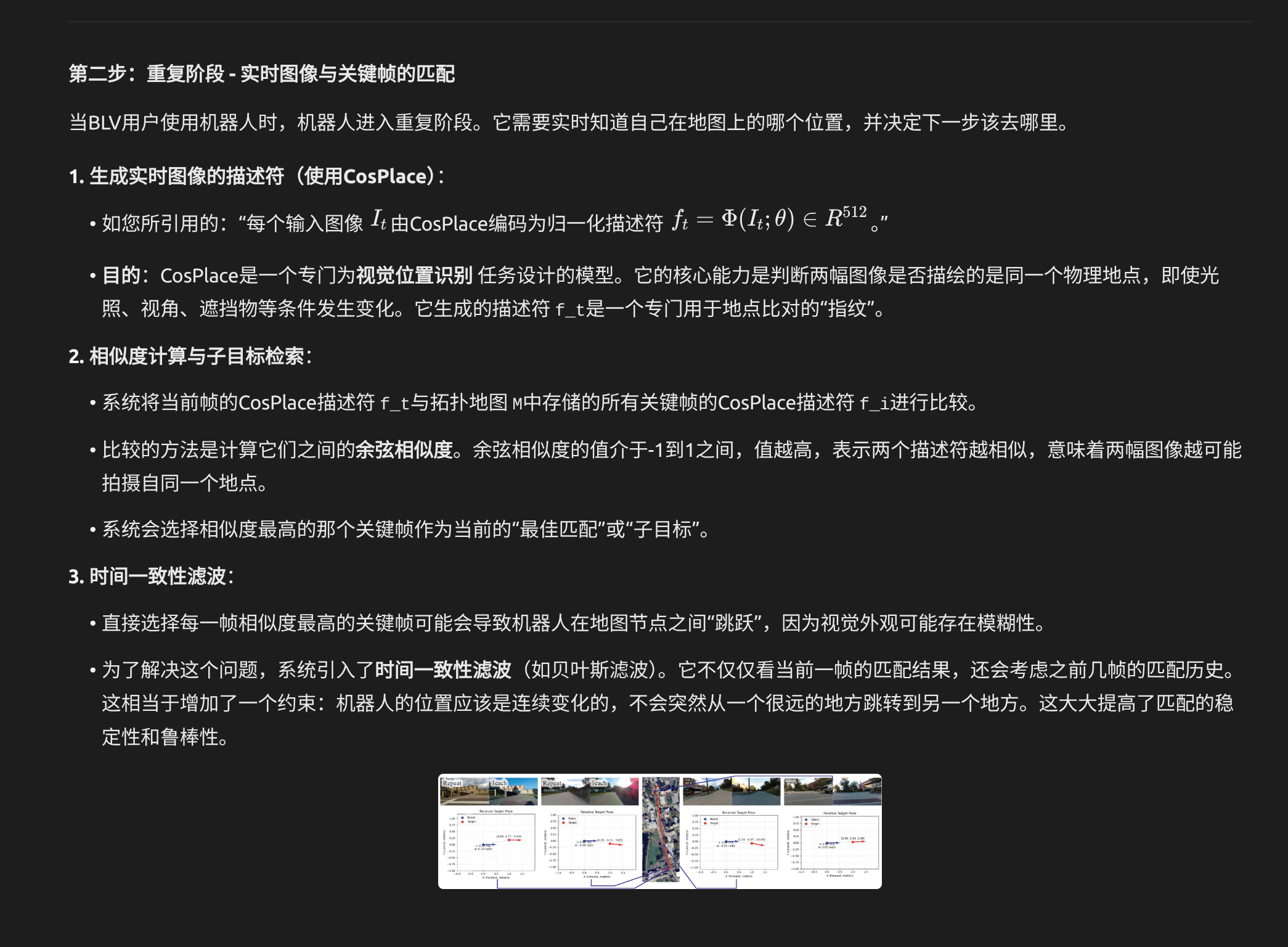
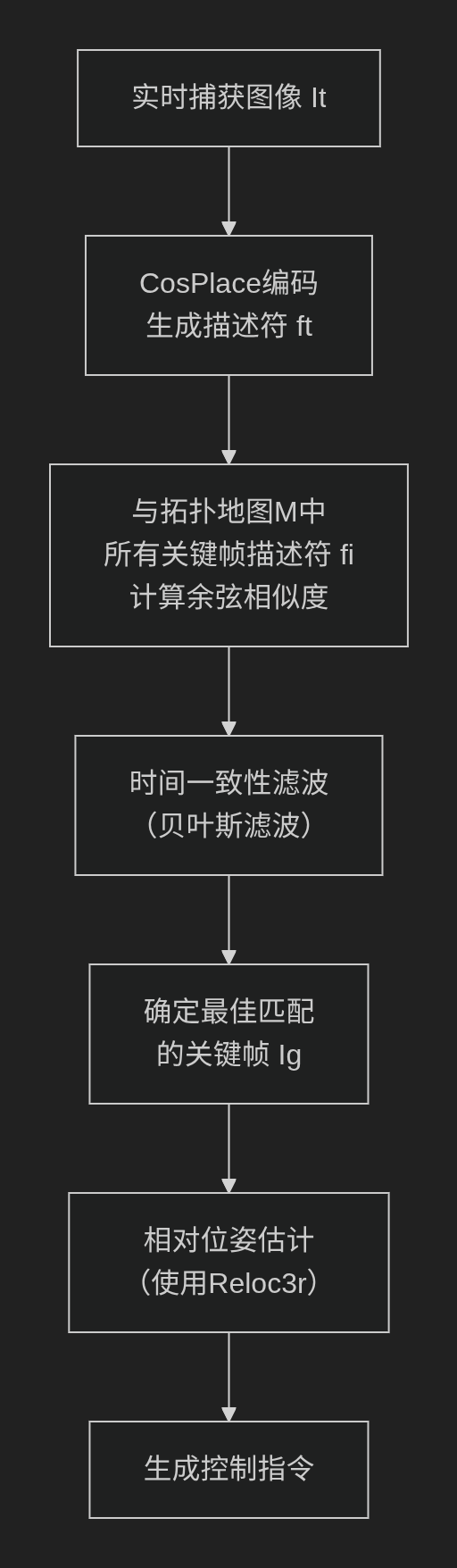
- 导航阶段(位置识别)需要“高精度”:
- 目标:在重复阶段,机器人需要回答一个非常具体的问题:“我当前看到的地方,对应地图中的哪个关键帧?”
- CosPlace的优势:它是专门为这个任务而生的。它对光照变化、季节变化、视角变化、动态物体(如行人、车辆)的干扰有更强的鲁棒性。它学习的正是如何排除这些干扰,抓住地点的本质特征进行匹配。
- 结果:用CosPlace进行实时匹配,定位精度更高、更稳定,能有效应对现实世界中不可避免的环境变化。
为什么不能反过来或用同一个模型?
- 为什么不用CosPlace选关键帧? CosPlace对细微的地点变化过于敏感。在建图时,它可能会因为光照的轻微波动或一辆车的驶过,就认为是一个新地点,导致生成一个过于密集、包含大量冗余关键帧的地图,浪费存储和计算资源。
- 为什么不用DINOv3做实时匹配? DINOv3的语义描述符不够“精确”。它可能会因为两个地方看起来“像”同一个类型的路口(语义相似),就错误地进行匹配,而实际上它们是两个不同的路口。这会导致机器人“认错路”,导航失败。
总结:协同工作的收益
GuideNav的设计体现了深刻的系统工程思想:
- 高效建图:利用DINOv3的语义理解,智能筛选关键帧,生成轻量级地图(~24MB/公里)。
- 鲁棒导航:利用CosPlace的专业定位能力,确保在变化环境下也能准确找到子目标。
- 系统优化:这种分工使得整个系统无需昂贵传感器,就能在嵌入式硬件(NVIDIA Jetson)上实时运行(5Hz),最终实现公里级的可靠导航。
因此,“DINOv3选帧,CosPlace存储匹配” 的策略,并非随意之举,而是经过深思熟虑后,针对导航任务中“建图”和“定位”这两个子问题的不同需求,所选择的最优技术路径。它完美地结合了通用基础模型的语义概括能力和专用模型的精准识别能力。